|
| virtual | ~MotorController ()=default |
| |
| virtual void | Set (double speed)=0 |
| | Common interface for setting the speed of a motor controller.
|
| |
| virtual void | SetVoltage (units::volt_t output) |
| | Sets the voltage output of the MotorController.
|
| |
| virtual double | Get () const =0 |
| | Common interface for getting the current set speed of a motor controller.
|
| |
| virtual void | SetInverted (bool isInverted)=0 |
| | Common interface for inverting direction of a motor controller.
|
| |
| virtual bool | GetInverted () const =0 |
| | Common interface for returning the inversion state of a motor controller.
|
| |
| virtual void | Disable ()=0 |
| | Common interface for disabling a motor.
|
| |
| virtual void | StopMotor ()=0 |
| | Common interface to stop the motor until Set is called again.
|
| |
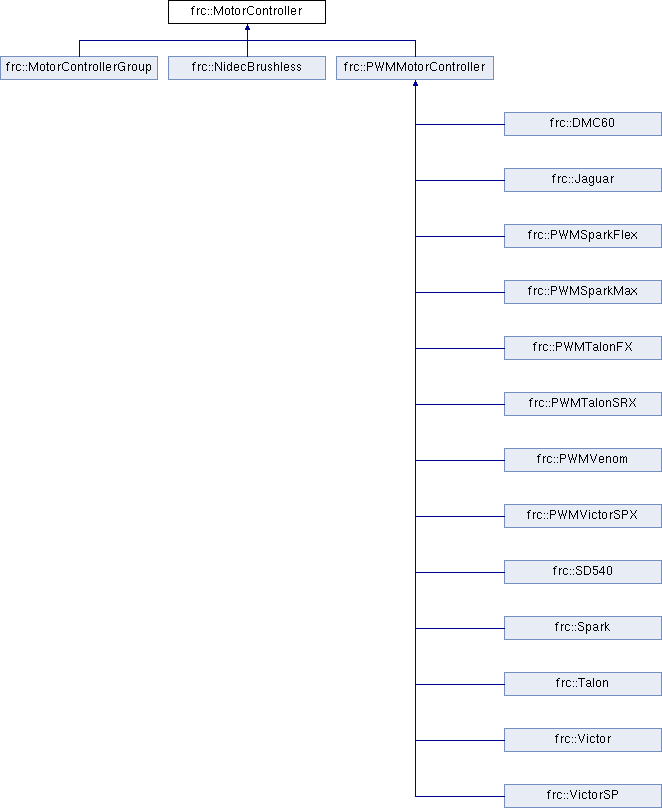
Interface for motor controlling devices.
| virtual void frc::MotorController::SetVoltage |
( |
units::volt_t | output | ) |
|
|
virtual |
Sets the voltage output of the MotorController.
Compensates for the current bus voltage to ensure that the desired voltage is output even if the battery voltage is below 12V - highly useful when the voltage outputs are "meaningful" (e.g. they come from a feedforward calculation).
NOTE: This function must be called regularly in order for voltage compensation to work properly - unlike the ordinary set function, it is not "set it and forget it."
- Parameters
-
| output | The voltage to output. |
Reimplemented in frc::MotorControllerGroup, and frc::PWMMotorController.