Implement a Robot Program framework.
More...
#include <wpi/framework/RobotBase.hpp>
|
| static bool | IsEnabled () |
| | Determine if the Robot is currently enabled.
|
| static bool | IsDisabled () |
| | Determine if the Robot is currently disabled.
|
| static bool | IsAutonomous () |
| | Determine if the robot is currently in Autonomous mode.
|
| static bool | IsAutonomousEnabled () |
| | Determine if the robot is currently in Autonomous mode and enabled.
|
| static bool | IsTeleop () |
| | Determine if the robot is currently in Operator Control mode.
|
| static bool | IsTeleopEnabled () |
| | Determine if the robot is current in Operator Control mode and enabled.
|
| static bool | IsUtility () |
| | Determine if the robot is currently in Utility mode.
|
| static bool | IsUtilityEnabled () |
| | Determine if the robot is currently in Utility mode and enabled.
|
| static int64_t | GetOpModeId () |
| | Gets the currently selected operating mode of the driver station.
|
| static std::string | GetOpMode () |
| | Gets the currently selected operating mode of the driver station.
|
| static std::thread::id | GetThreadId () |
| | Returns the main thread ID.
|
| static RuntimeType | GetRuntimeType () |
| | Get the current runtime type.
|
| static constexpr bool | IsReal () |
| | Get if the robot is real.
|
| static constexpr bool | IsSimulation () |
| | Get if the robot is a simulation.
|
Implement a Robot Program framework.
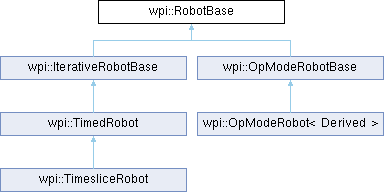
The RobotBase class is intended to be subclassed to create a robot program. The user must implement StartCompetition() which will be called once and is not expected to exit. The user must also implement EndCompetition(), which signals to the code in StartCompetition() that it should exit.
It is not recommended to subclass this class directly - instead subclass IterativeRobotBase or TimedRobot.
◆ RobotBase() [1/2]
| wpi::RobotBase::RobotBase |
( |
| ) |
|
Constructor for a generic robot program.
User code can be placed in the constructor that runs before the Autonomous or Operator Control period starts. The constructor will run to completion before Autonomous is entered.
This must be used to ensure that the communications code starts. In the future it would be nice to put this code into it's own task that loads on boot so ensure that it runs.
◆ ~RobotBase()
| virtual wpi::RobotBase::~RobotBase |
( |
| ) |
|
|
virtualdefault |
◆ RobotBase() [2/2]
| wpi::RobotBase::RobotBase |
( |
RobotBase && | | ) |
|
|
protecteddefault |
◆ EndCompetition()
| virtual void wpi::RobotBase::EndCompetition |
( |
| ) |
|
|
pure virtual |
◆ GetOpMode()
| std::string wpi::RobotBase::GetOpMode |
( |
| ) |
|
|
static |
Gets the currently selected operating mode of the driver station.
Note this does not mean the robot is enabled; use IsEnabled() for that.
- Returns
- Operating mode string; may return a string not in the list of options, so callers should be prepared to handle that case
◆ GetOpModeId()
| int64_t wpi::RobotBase::GetOpModeId |
( |
| ) |
|
|
static |
Gets the currently selected operating mode of the driver station.
Note this does not mean the robot is enabled; use IsEnabled() for that.
- Returns
- the unique ID provided by the RobotState::AddOpMode() function; may return 0 or a unique ID not added, so callers should be prepared to handle that case
◆ GetRuntimeType()
Get the current runtime type.
- Returns
- Current runtime type.
◆ GetThreadId()
| std::thread::id wpi::RobotBase::GetThreadId |
( |
| ) |
|
|
static |
Returns the main thread ID.
- Returns
- The main thread ID.
◆ IsAutonomous()
| bool wpi::RobotBase::IsAutonomous |
( |
| ) |
|
|
static |
Determine if the robot is currently in Autonomous mode.
- Returns
- True if the robot is currently operating Autonomously as determined by the Driver Station.
◆ IsAutonomousEnabled()
| bool wpi::RobotBase::IsAutonomousEnabled |
( |
| ) |
|
|
static |
Determine if the robot is currently in Autonomous mode and enabled.
- Returns
- True if the robot us currently operating Autonomously while enabled as determined by the Driver Station.
◆ IsDisabled()
| bool wpi::RobotBase::IsDisabled |
( |
| ) |
|
|
static |
Determine if the Robot is currently disabled.
- Returns
- True if the Robot is currently disabled by the Driver Station.
◆ IsEnabled()
| bool wpi::RobotBase::IsEnabled |
( |
| ) |
|
|
static |
Determine if the Robot is currently enabled.
- Returns
- True if the Robot is currently enabled by the Driver Station.
◆ IsReal()
| constexpr bool wpi::RobotBase::IsReal |
( |
| ) |
|
|
inlinestaticconstexpr |
Get if the robot is real.
- Returns
- If the robot is running in the real world.
◆ IsSimulation()
| constexpr bool wpi::RobotBase::IsSimulation |
( |
| ) |
|
|
inlinestaticconstexpr |
Get if the robot is a simulation.
- Returns
- If the robot is running in simulation.
◆ IsTeleop()
| bool wpi::RobotBase::IsTeleop |
( |
| ) |
|
|
static |
Determine if the robot is currently in Operator Control mode.
- Returns
- True if the robot is currently operating in Tele-Op mode as determined by the Driver Station.
◆ IsTeleopEnabled()
| bool wpi::RobotBase::IsTeleopEnabled |
( |
| ) |
|
|
static |
Determine if the robot is current in Operator Control mode and enabled.
- Returns
- True if the robot is currently operating in Tele-Op mode while enabled as determined by the Driver Station.
◆ IsUtility()
| bool wpi::RobotBase::IsUtility |
( |
| ) |
|
|
static |
Determine if the robot is currently in Utility mode.
- Returns
- True if the robot is currently running in Utility mode as determined by the Driver Station.
◆ IsUtilityEnabled()
| bool wpi::RobotBase::IsUtilityEnabled |
( |
| ) |
|
|
static |
Determine if the robot is currently in Utility mode and enabled.
- Returns
- True if the robot is currently operating in Utility mode while enabled as determined by the Driver Station.
◆ operator=()
◆ StartCompetition()
| virtual void wpi::RobotBase::StartCompetition |
( |
| ) |
|
|
pure virtual |
◆ connListenerHandle
◆ m_threadId
| std::thread::id wpi::RobotBase::m_threadId |
|
staticprotected |
The documentation for this class was generated from the following file: